<aside>
CVXPY 提供凸性检测,原理是 Disciplined Convex Programming ,网页入口:
https://dcp.stanford.edu/home | DCP analyzer:
将函数用cvxpy自带的 Functions 表示,会返回凸性分析结果。
将函数用cvxpy自带的 Functions 表示,会返回凸性分析结果。
[ ] 凸函数与凸集什么关系?为什么说凸集的定义更普适? </aside>
<aside>
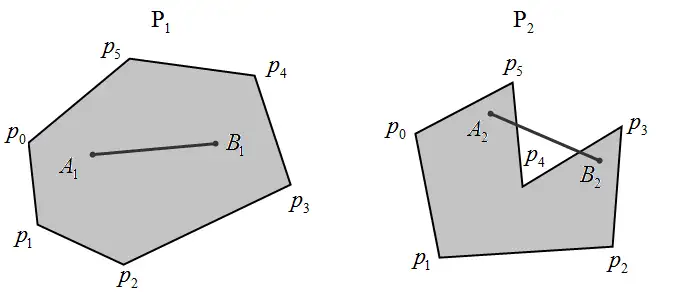
$\forall x,y\in S$ and $\alpha \in [0,1]$, we have their convex combination / line segment is also belongs to $S$
$$ \alpha x+(1-\alpha)y\in S $$
凸集定义为 存在加法运算和对应标量空间的集合的子集,满足集合中任意元素的凸组合仍在集合内。
A set is convex: $x\in S,y\in S$→ segment $xy\subset S$.
segment $xy:\alpha x+\beta y,\alpha,\beta\ge0,\alpha+\beta =1$. to Convex Combination to barycentric coordinates.
$$ \boxed{ \alpha x+\beta y\in \Omega}\\x,y\in \Omega,\alpha +\beta=1,\alpha,\beta \in \R $$
</aside>
a specific convex set with the line rather line segment
$$ \alpha x+(1-\alpha )y\in S,\ \alpha \in \R $$
凸组合是两变量的线性组合,其线性因子和为1且0~1。
affine combination $\sum_i \alpha_i=1\to \sum_i \alpha_ix_i$, $A(M\in \R^n)=\sum_i^r \alpha_im_i,r\in N_+\}$
锥组合类似,线性因子非负
Theorem
An affine set is subspace of $\R^n$
iff $0\in S$
S is parallel to $U$ if $\exists x$
$$ S=x+U. $$
⇒ affine space = its any element + unique subspace with U//S = x + $\ker S$
and Affine dimension: $\dim S=\dim U$
Affine hyperplane: $H_{S,r}=\{x\in \R^n:\lang s,x\rang =r\}$ s 法向量,r是截距
$H_{S,0}=\{s\}^\perp$ 垂直超平面
Half Spaces: $\{x\in \R^n:\lang s, r\rang\le r\}$is closed and $\{x\in \R^n:\lang s, r\rang>r\}$is open affine set
Affine Hull: $Aff\ M=\bigcap_{M\subset S} S_{affine}$ smallest affine hull of subset
property
Affine independent
$x_0,x_1,\cdots,x_p$ are affine independent iff $x_1-x_0,\cdots,x_p-x_0$ are linear independent.
prop these are quivalent
$x_0,x_1,\cdots,x_p$ are affine independent
$(x_0,1),(x_1,1),\cdots,(x_p,1)$ are linear independent
below admits a unique solution
$$ \begin{aligned} \sum_{i-0}^p\alpha_ix_i=0,\\ \sum_{i=0}^p \alpha_i=0 \end{aligned} $$
(1) ⇒ (2) $\sum_{i-0}^p\alpha_ix_i-\sum_{i=0}^px_0=$affine independent
(2) <⇒ (3)
(3) ⇒ (1) let $\alpha_0=-\sum_{i=1}^P \alpha_i$, we get linear combination
$$ \Delta n=\{ \alpha\in \R^n:\sum{i=1}^n\alpha_i=1,\alpha_i\ge 0 \}\subset \R^n\\= \{\alpha\in \R^n:e^T\alpha =1,e_i^T\alpha\ge 0\} $$
$e_i$ is orthonormal basis;
n half-space within a hyperplane
intersection of a family of convex sets is convex set
笛卡尔积$\prod C_i$ 也是 convex set
明可夫斯基和 $\lambda A+\mu B$ is also convex set
$int\ C$ and $cl\ C$ are convex set
$cl\ C$ is intersection of $C$ and some small unit ball $cl \ C =\prod_{\epsilon >0} (C+\epsilon B)$
convex combination of two neighborhood set are also subset to the same set
$$ U_1\subset S,U_2\subset S\to convex(U_1,U_2)\subset S $$
homework:寻找更多性质 $F(S)$ $F(aff\ M)$
Python库:SciPy.spatial.ConvexHull
<aside>
</aside>
Some formal definitions and approaches.
凸函数的上图可通过透视法扩展为凸锥(包),凸优化 Convex Optimization 进而规约为锥规划 Conic Optimization
一阶优化算法中的投影法 3. 指数锥的投影问题
内点法 Clarabel